



ANNEE 2, 3, 4
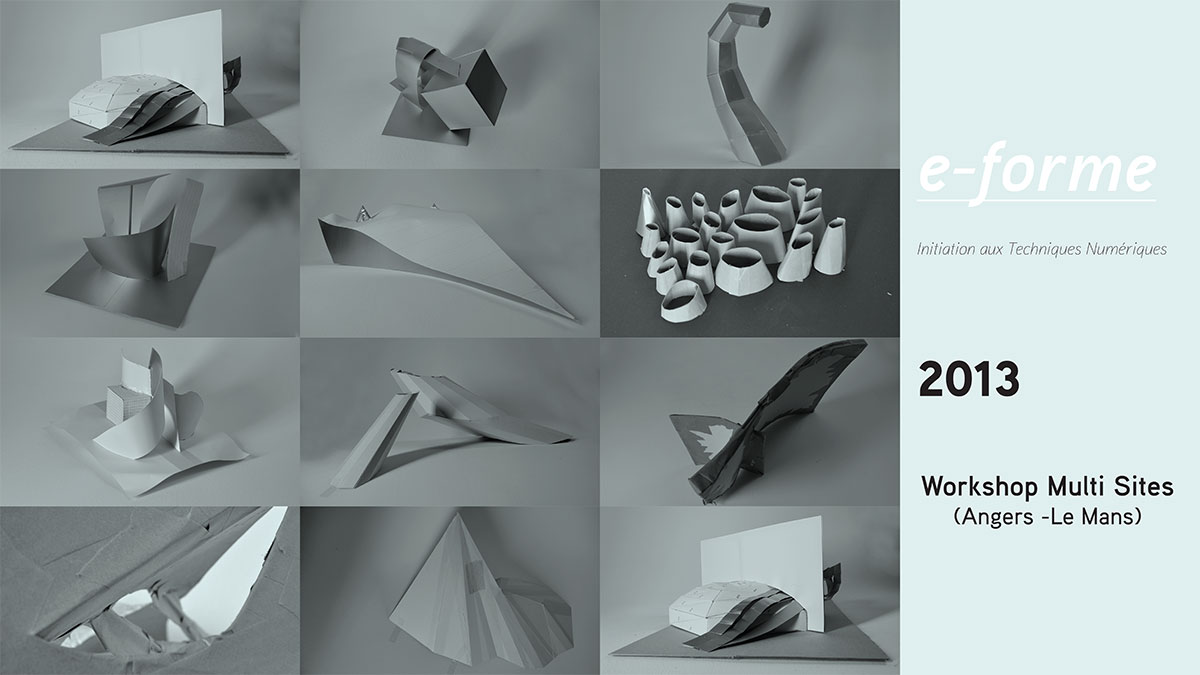
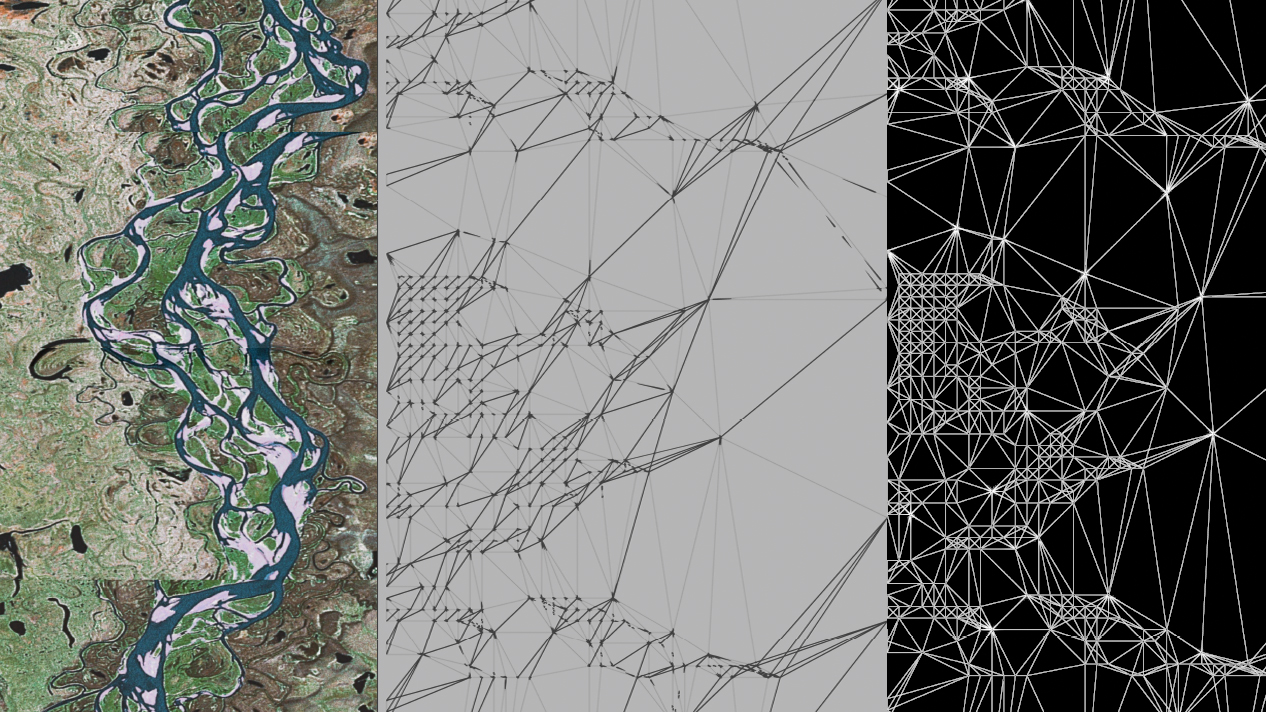
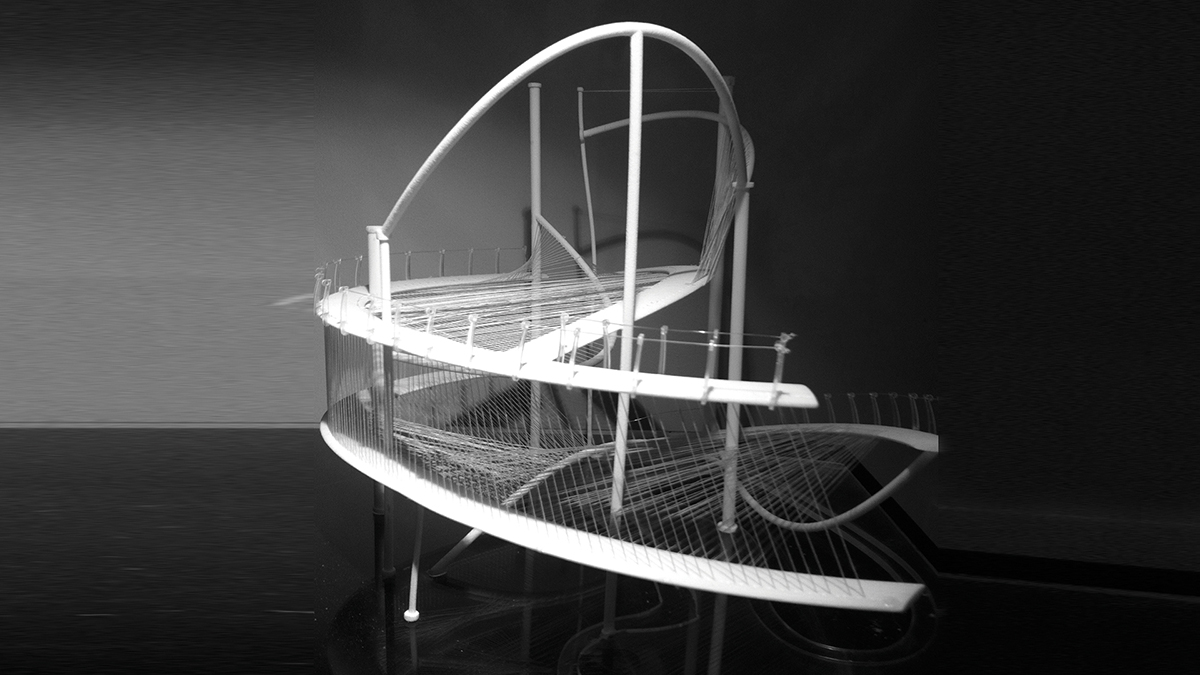
L’intensif D5W pour les étudiants de Licence 3 sera consacré à l’enseignement de la simulation et du contrôle des processus de fabrication et construction assistés par ordinateur afin d’intégrer des informations physiques, matérielles, à des processus de conception. Durant cette semaine, chaque intensif, dirigé par au moins un enseignant et un moniteur, se concentrera sur l’enseignement de la fabrication de pièces spécifiques ou la simulation de processus physiques matériels et/ou de construction. Ceci permettra d’initier un développement du raisonnement de conception de formes vers l’intégration de ses implications matérielles et organisationnelles (relations au sol, séquençage, conditions de bords, etc…). Outre les logiciels et langages de scripting / programmation enseignés, les notions critiques abordées en pratique seront la simulation, l’intégration de performances, le contrôle, les agrégations de composants et la géométrie structurale. Le travail final demandé devra refléter la bonne compréhension de chacun de ces aspects. Les textes et références fournis alimenteront la réflexion.
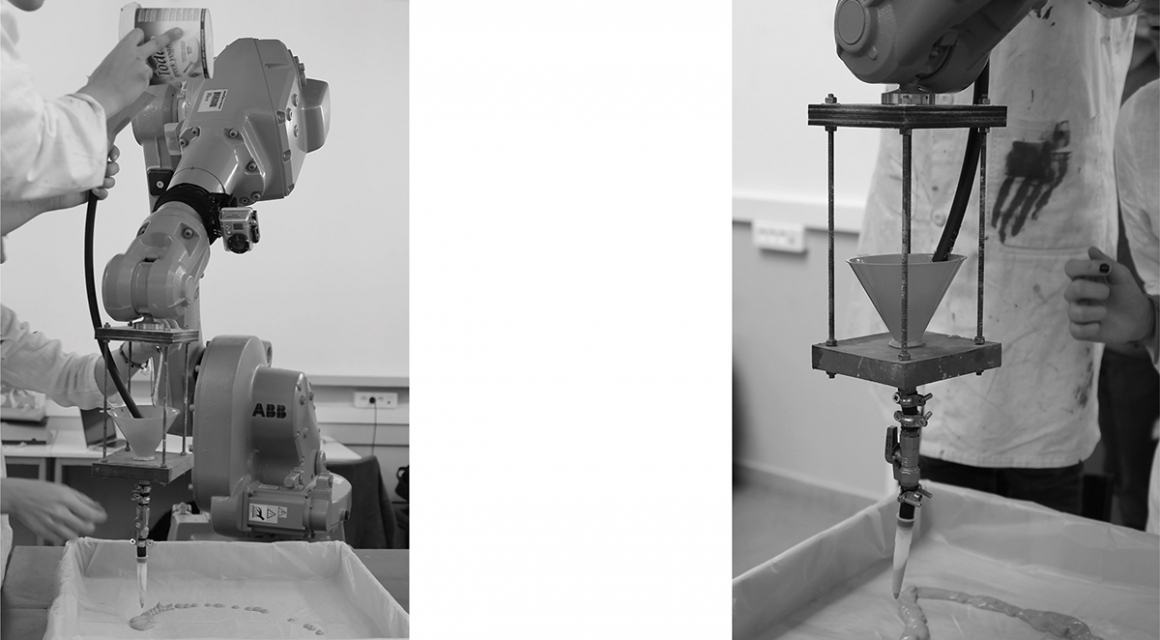
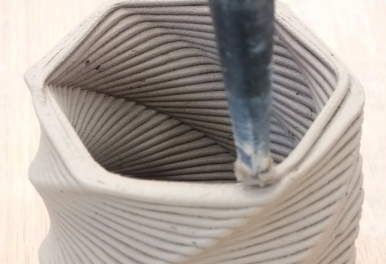
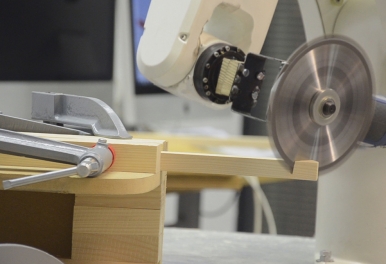
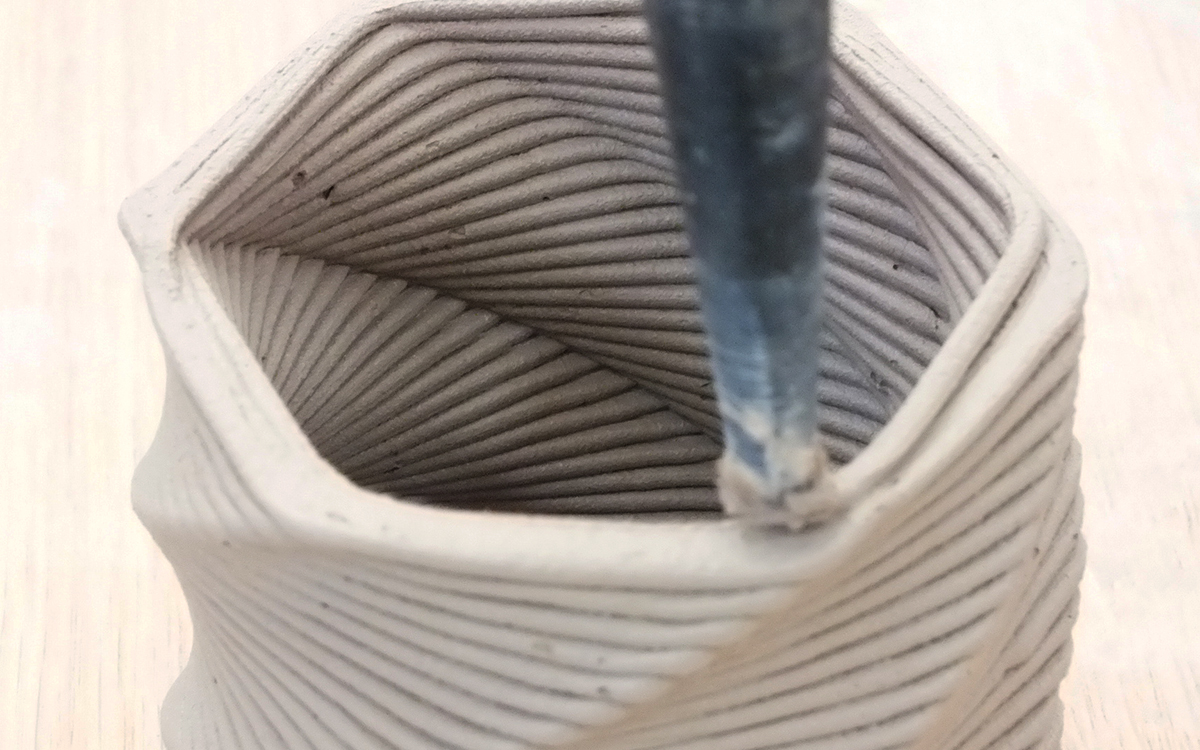
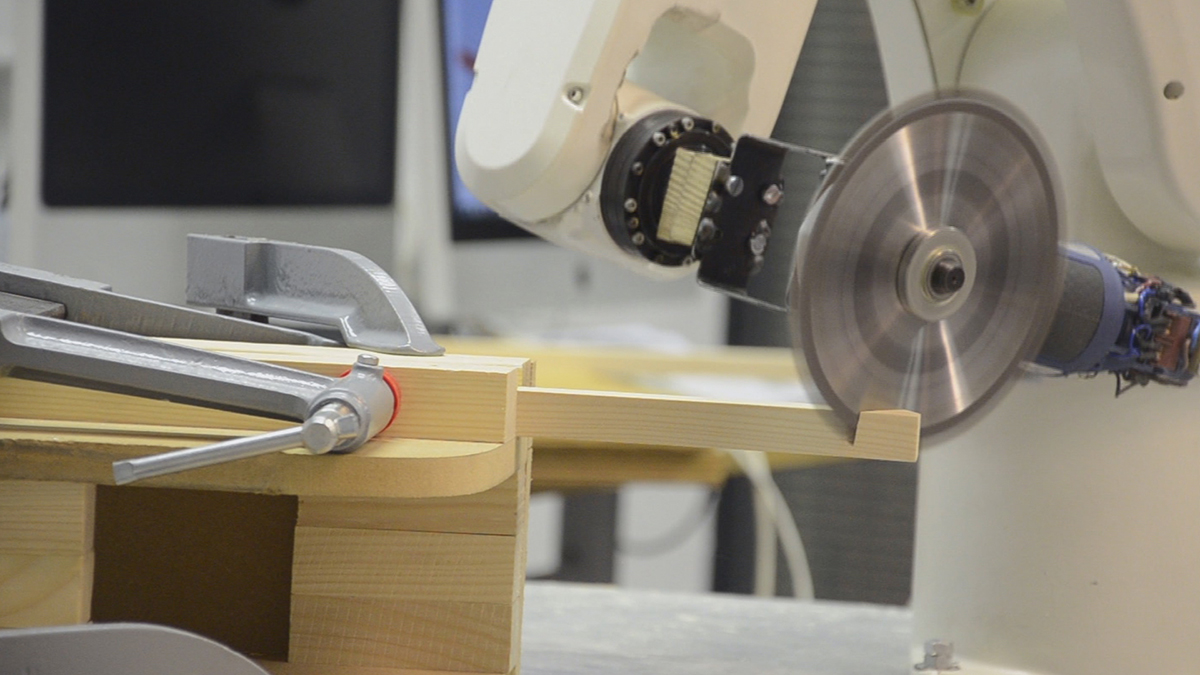
Initiation à la robotique 6 axes et à la création de parcours d’outils. Création d’un outillage spécifique. A partir des éléments matériels donnés en début de workshop (électro-aimant, support de fraise, platine libre, etc.) chaque groupe modélise et fabrique un outil (prototype) à connecter au robot 6 axes, dans l’objectif d’inventer un processus de production et de fabrication par le biais d’une programmation de mouvement du robot (en RAPID).
Marie Chevrier et Armelle Martin-Richon
Kim Yoona, Caroline Hug de Larauze & Nicolas Quiterie
Caroline Hug de Larauze & Nicolas Quiterie
Alieth Barbet, Nikola Jovanovic & Margaux Bullier
Manon Fichet, Ingrid Noual et Laure Lepigeon
Kubrusly Marcia, Corentin Morel & Nicolas Siffermann




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}