






ANNEES 1, 2, 3, 4
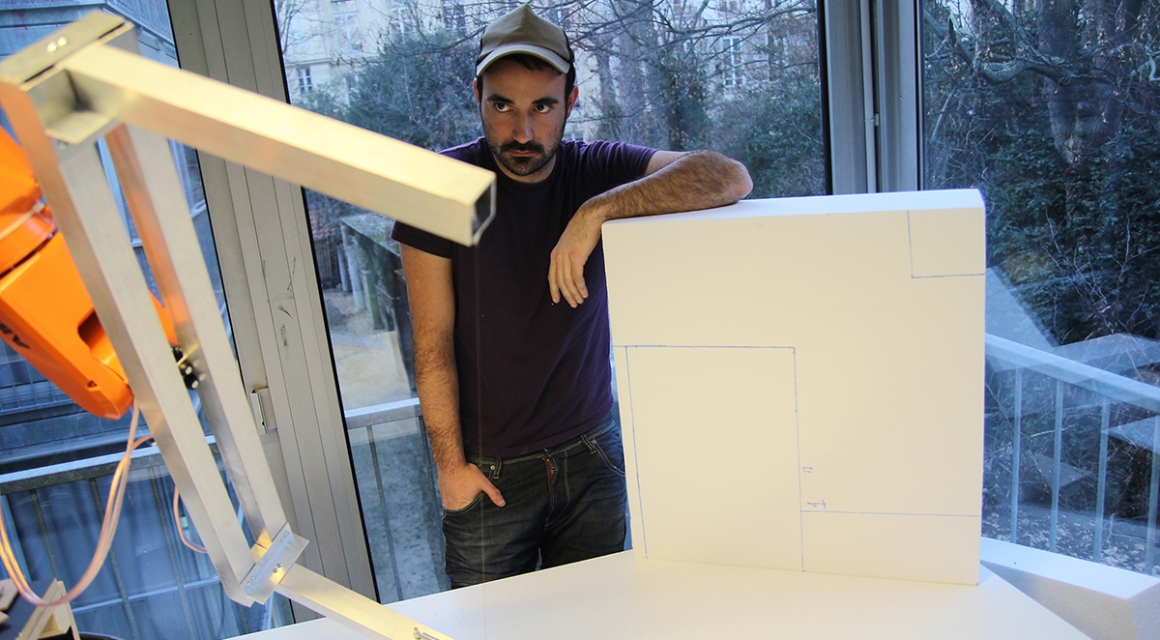
Gestes et trajectoires est un workshop organisé par Felix Agid et Minh Man Nguyen à l’ENSAPM portant sur les interactions entre opérations gestuelles humaines et opérations programmés sur un robot 6 axes, en vue de la fabrication d’objet et de formes.
Chaque action sur le milieu dépend d’un outillage. Celui-ci atteint son but s’il simule ou réduit d’autant la quantité de gestes humains nécessaires à la tâche quantifiés : le travail. Cet intensif place en fond la diminution inexorable des besoins en travail humain pour ce qui concerne la grande majorité de la production de biens. Le travail quantifiable est ici pensé comme un chemin parcouru ou une trajectoire. Babbage rappelait dans son célèbre ouvrage que « Lorsqu’on élève d’un mètre un poids de 1Kg, l’effort est bien évidemment, constamment de 1 kg, tout comme quand on l’élève à 2 mètres ; mais l’effet utile, mais le travail, ce qui se paye (…) est évidemment double dans le second cas : c’est le produit de l’effort par le chemin parcouru, pour lequel on a crée l’unité du Kg, toutes les forces pouvant être évaluées en kg et les longueurs en mètre ». Le chemin parcouru est ici pensé comme une série de points discrets correctement orientés.
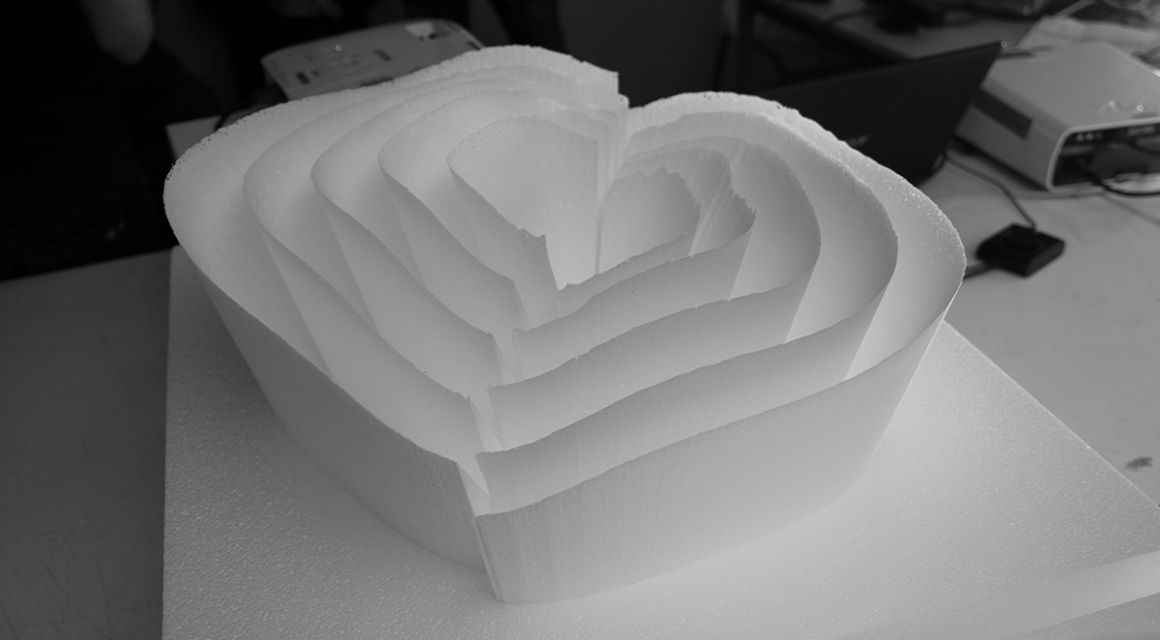
Cet enseignement veut chercher le moyen de mesurer, par le biais d’un protocole expérimental, la différence entre une opération gestuelle humaine (communication non verbale) et la trajectoire entendue comme programme. L’idée est d’explorer les opportunités de combinaisons et d’intersections entre les deux opérations, en se référant à des notions comme celles de balayage, usinage, polissage, découpe.
A partir d’un capteur de mouvement des corps (kinect) et d’un programme associant à ces mouvements des caractéristiques géométriques stables, chaque groupe d’étudiant détermine un protocole en vue de la fabrication robotisée d’une forme.
Les trajectoires du robot ABB IRB120, en prêt à l’ENSAPM, sont obtenues par le biais du programme HAL (Thibalut Schwartz).
Deleforge Adrien, (ENSAPM)
El Arabi Rim, (ENSAPM)
Gaudilliere Nadja, (ENSAPM)
Gobin Tristan, (ENSAPM)
Gomez Herrera yostino (ENSAPM)
Herbera Theo, (ENSAPM)
Aziza Guermazi, (ENSAPM)
Jaidi Lina, (ENSAPM)
Jlil Taoufik, (ENSAPM)
Kutlu Meite, (ENSAPM)
Shen Yuan, (ENSAPM)
Thellier Arthur, (ENSAPM)
Usai Sylvain, (ENSAPM)
Lily Lutz, (Columbia University)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}